Biologically Inspired Water Strider Robot
The majority of current water strider robots are limited by their ability to jump on the water surface. In order to address this problem, innovative mechanical design can be used. A potential solution is the combination of hydrophobic pads and a spring-based launching device. Incorporating this design would increase the maneuverability of water surface robots. This paper discusses the progress in prototyping and modeling the water strider system. This research was undertaken as part of Carnegie Mellon University's Fall 2012 24676 Bio-inspired Robotics course.Collaborators
KJ Lee
Laura Laham
Nathan Krasnoff
Eric Diller
Dr. Metin Sitti
Carnegie Mellon Nanorobotics Lab
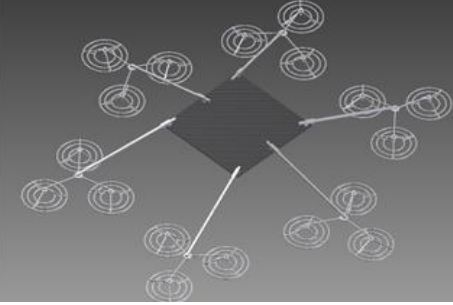
SolidWorks CAD model for the spring-loaded shock absorption system.

CAD model for the uncontracted legs (before landing).
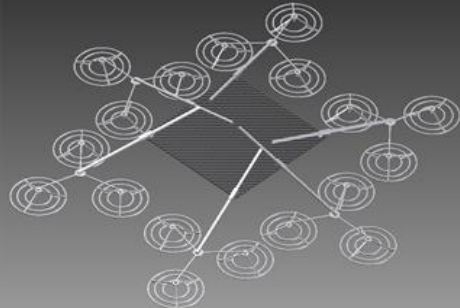
CAD model for the contracted legs (after landing).
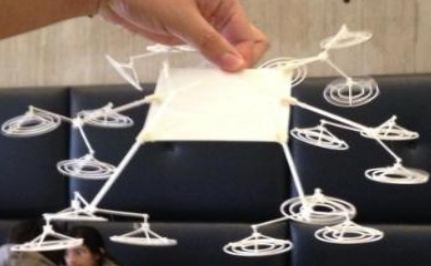
Fabricated prototype of the robot. Components were laser cut from plastic.
Carnegie Mellon Nanorobotics Lab
Downloads
Paper PDF Presentation PDFPictures
SolidWorks CAD model for the spring-loaded shock absorption system.
CAD model for the uncontracted legs (before landing).
CAD model for the contracted legs (after landing).
Fabricated prototype of the robot. Components were laser cut from plastic.