Grad Research
Scalable Manufacturing of Solderable and Stretchable Physiologic Sensing Systems | ||
 |
| |
Custom Soft Robotic Gripper Sensor Skins for Haptic Object Visualization | ||
 |
| |
Differential Pressure Control of 3D Printed Soft Fluidic Actuators | ||
 |
| |
Soft Pneumatic Actuators for Legged Locomotion | ||
 |
| |
Undergrad Research
Shingler on the Roof | ||
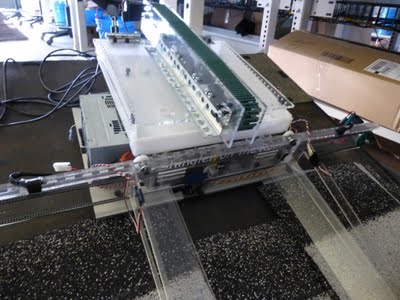 |
| |
Hand Input Classification | ||
|
|
| |
Biologically Inspired Water Robot | ||
|
|
| |
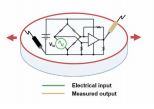
Flux Gate Magnetometer | ||
|
|
| |
Temperature-Dependent Raman Spectroscopy of Fullerene Nanocar Wheels | ||
|
|
| |
High School Research
CO2 Storage in Novel CO2-H2O Phases at High Pressure | ||
|
|
| |
Mobile Robot Communication | ||
 |
| |
Hammer Protection | ||
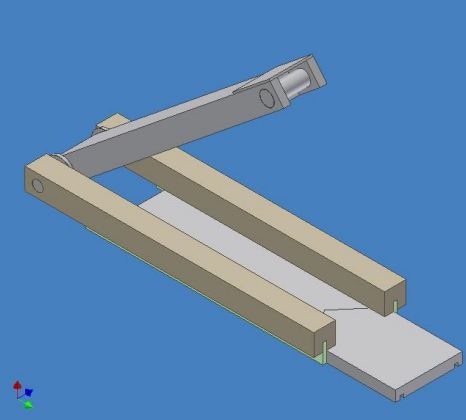 |
| |
Trebuchet Design and Analysis | ||
 |
| |
Melting Point of Ice | ||
 |
| |
Measuring the Height of a Steeple | ||
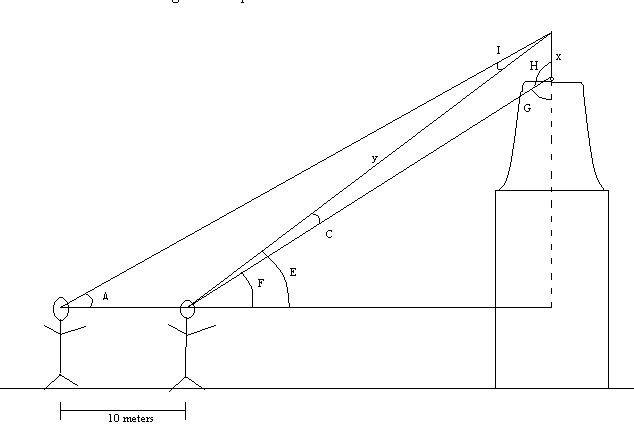 |
| |