Grad Projects
Quantum Robotics: A Primer on Current Science and Future Perspectives | ||
 |
| |
Momentum Machines | ||
 |
| |
Dekoboko | ||
 |
| |
CompanionCube | ||
 |
| |
YARN - Your Augmented Reality Notes | ||
 |
| |
Real-time Mosaicking and Tracking on UAV | ||
 |
| |
Undergrad Projects
Wirelessly Programmable Arduino | ||
 |
| |
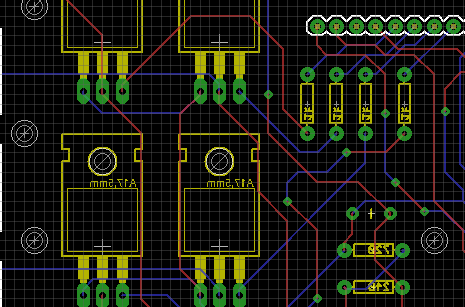
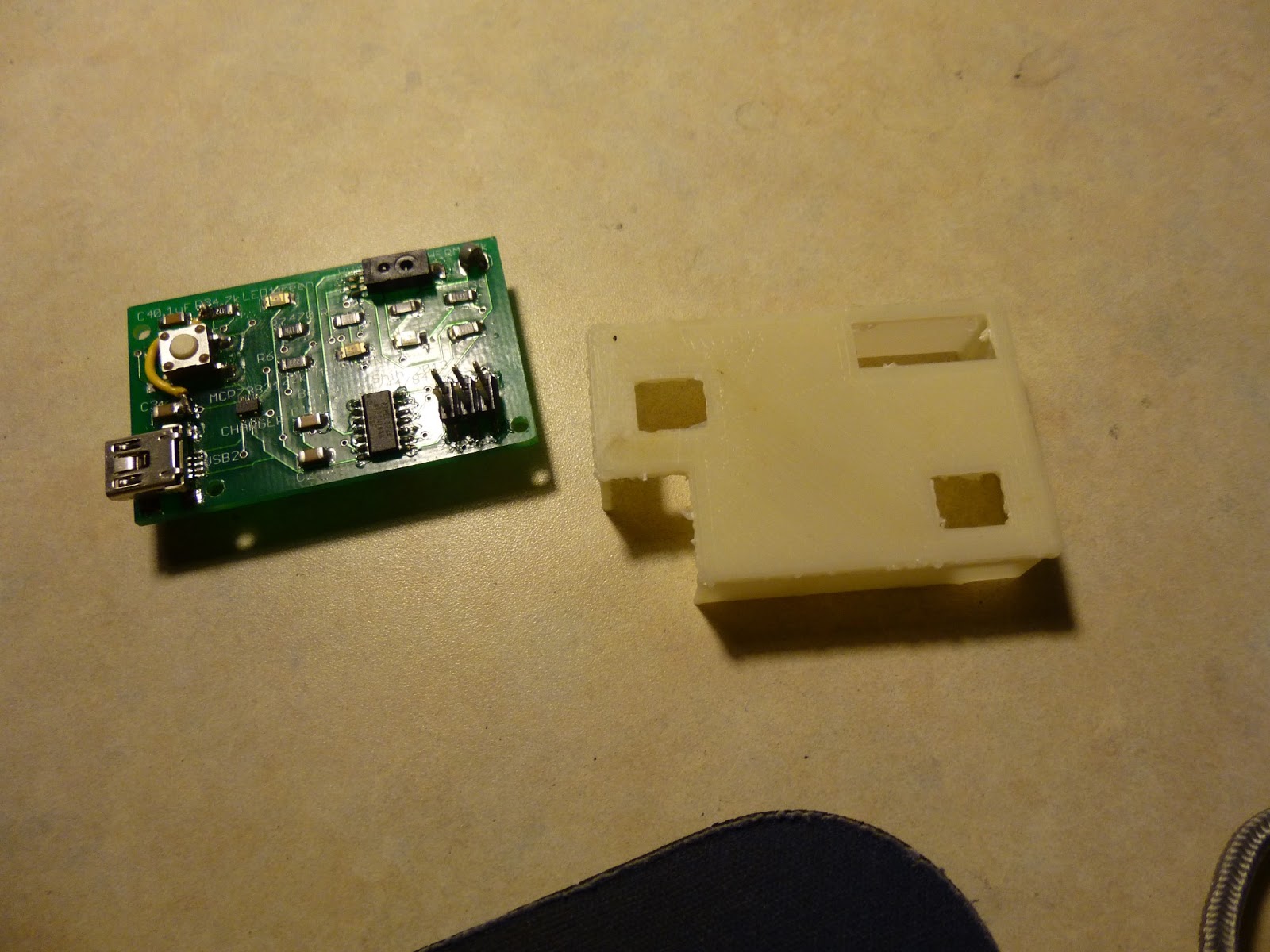
Green Thumb PCB | ||
 |
| |
Sensors and Sensing - 16722 S13 | ||
 |
| |
Welding - 54264 F12 | ||
 |
| |
Machine Learning with Signal Processing - 18797 F12 | ||
 |
| |
Robot Kinematics and Dynamics - 16384 F12 | ||
|
|
| |
Introduction to Robotics - 16311 S12 | ||
|
|
| |
Microelectronic Circuits - 18320 F11 | ||
|
|
| |
Line-Following Mobile Robot | ||
|
|
| |
Carnegie Mellon Spring Carnival Booth - Hunting Game | ||
|
|
| |
High School Projects
National Science Bowl | ||
 |
| |
Ocean Science Bowl | ||
 |
| |
Pinhole Camera | ||
|
|
| |
Lose Yourself - Virtual Reality Environment Concept | ||
|
|
| |